お問い合わせ
ダウンロード
マニュアル、データシート、ソフトウェアなどのダウンロード:
フィードバック
三相インバータ/モータ/ドライブ解析
5/6 シリーズ B MSO 用 Opt. 5-IMDA/6-IMDA アプリケーション データ・シート
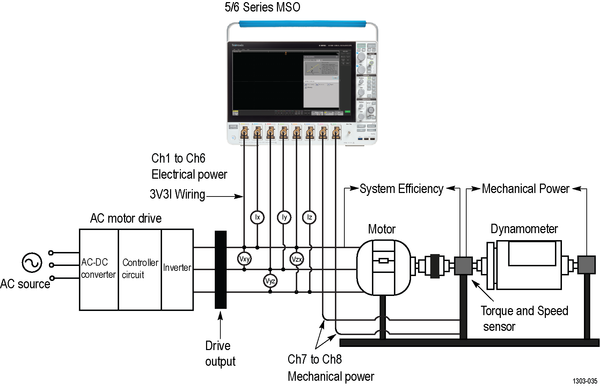
三相電力システムの測定と解析は、本質的に単相システムよりも複雑です。オシロスコープは、高いサンプル・レートで電圧、電流波形を取り込むことができますが、データから主要な電力測定値を生成するには再度計算が必要になります。オシロスコープベースの三相ソリューションでは、高いサンプル・レート、HiResアクイジション・モードを使用したロング・メモリで三相の電圧、電流波形を取り込むため、分解能は最高で16ビットになり、自動測定機能によって主なパワー・テストの結果が得られます。可変周波数モー タ・ドライブなどのパルス幅変調(PWM)をベースにしたパワー・コンバータでは、PWM信号の正確なゼロクロス・ポイントの検出が非常に重要となるため、測定は非常に複雑になます。このため、モータの設計エンジニアの検証、トラブルシュートでは、オシロスコープが推奨のテスト・ツールとなっています。インバータ、モータ、およびドライブのパワー解析を自動化するように設計された特別のソフトウェアは、PWMシステムで三相電力測定を大幅に簡素化し、エンジニアは設計に関する詳細データを、より迅速に得ることができます。テクトロニクスのインバータ/モータ/ドライブ解析(IMDA)ソリューションは、5 シリーズ/5シリーズB/6 シリーズB MSOの高度なユーザ・インタフェース、6 または8つのアナログ入力チャンネル、および16ビットの高垂直分解能(HiRes)の特長を存分に生かし、エンジニアの三相モータ・ドライブ・システムのより良い、より効率的な設計を支援します。IMDAソリューションは、産業用モータ、およびAC誘導モータ、永久磁石同期モータ(PMSM)、ブラシレス DC(BLDC)モータのドライブ・システムの電子測定に際し、正確で再現性に優れた測定結果を提供します。DC測定から、電気自動車で使用される三相ACコンバータなどの測定にも構成可能です。
主な特長と仕様
- AC誘導、BLDC、およびPMSMモータに使用される三相 PWM信号を正確に解析
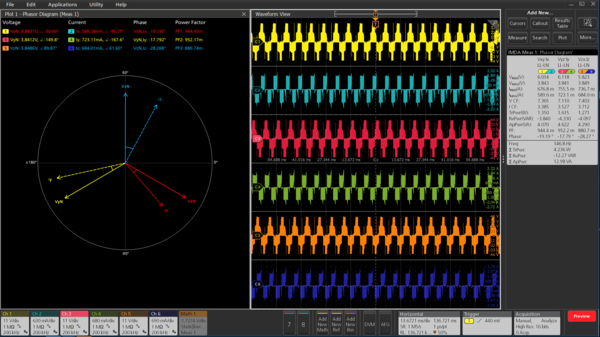
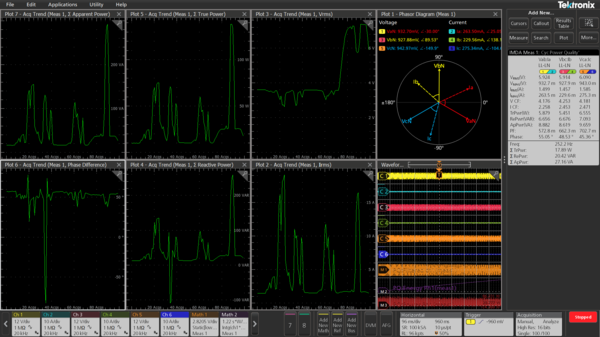
- 画期的なオシロスコープベースのフェーザ図により、VRMS、IRMS、VMAG、IMAGおよび設定された配線ペアの位相関係を表示
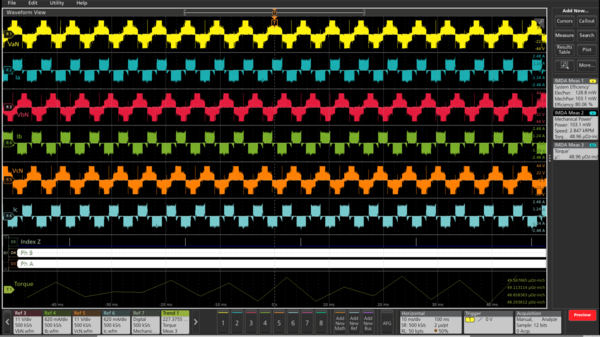
- フェーザ図と同時にドライブの入力/出力電圧と電流信号を時間軸で観測可能。モータ・ドライブ設計のデバッグに最適
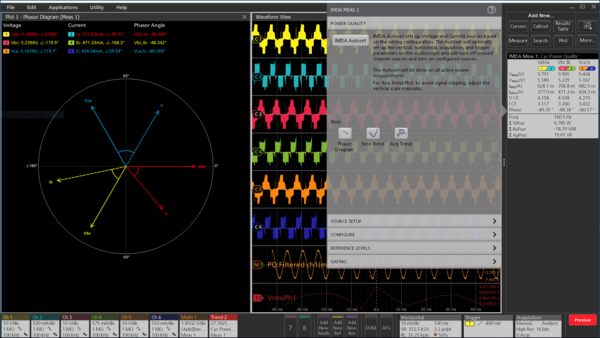
- 三相オートセット機能により、オシロスコープの水平、垂直、トリガ、アクイジションの各パラメータを三相信号の取込みに最適化して自動設定
- IEC-61000-3-2、IEEE519-2014、IEEE519-2022規格に従って、またはカスタムのリミット値を使用して三相の高調波を測定します。
- 選択した結線構成に基づくシステム効率の測定
- 5シリーズ/5シリーズB/6 シリーズ B MSOの直感的なドラッグ・アンド・ドロップ・インタフェースを使用して、測定項目をすばやく追加、構成することが可能
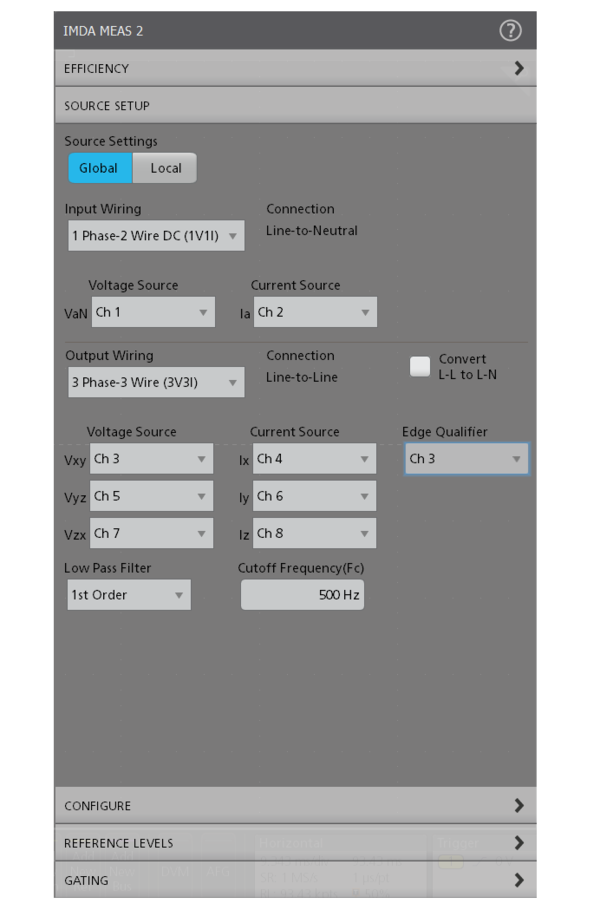
- インバータ/車載三相設計解析:DC入力/AC出力結線構成に対応可能
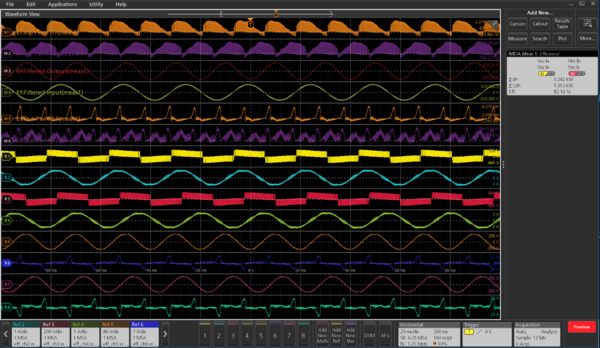
- 解析において、PWMフィルタリングされるエッジ・クオリファイア波形を表示
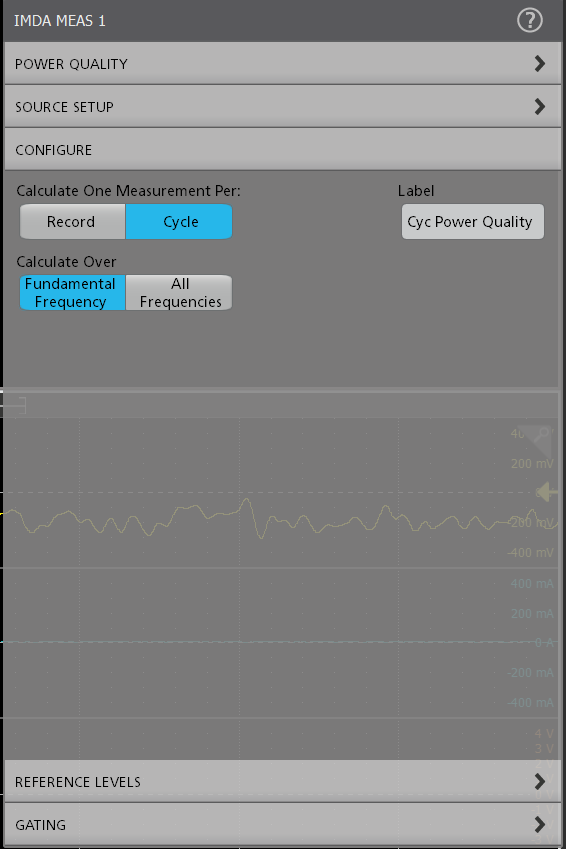
- 特定の測定において、レコードごと、サイクルごとのモードによるテスト結果を表示
- 特定の測定において、時間トレンド、アクイジション・トレンドのプロットを表示
- 特定の結線構成におけるライン-ニュートラルへの演算変換をサポート
- オシロスコープ・カーソルを使用して、フェーザおよび結果のベクター・ナビゲーションによるDQ0計測をサポート
- DQ0測定に対する角測定オフセット構成をサポート
- レゾルバ、ホール・センサーおよび QEI (直交エンコーダ・インターフェイス) 信号 (インデックス・パルスあり/なし) を使用した機械測定およびDQ0をサポート。
- トルク測定をサポート。
- 基本周波数およびフル・スペクトラムによるすべての測定の高調波ゲーティングをサポート。
- 機械電源およびシステム効率を計算します。
測定の概要
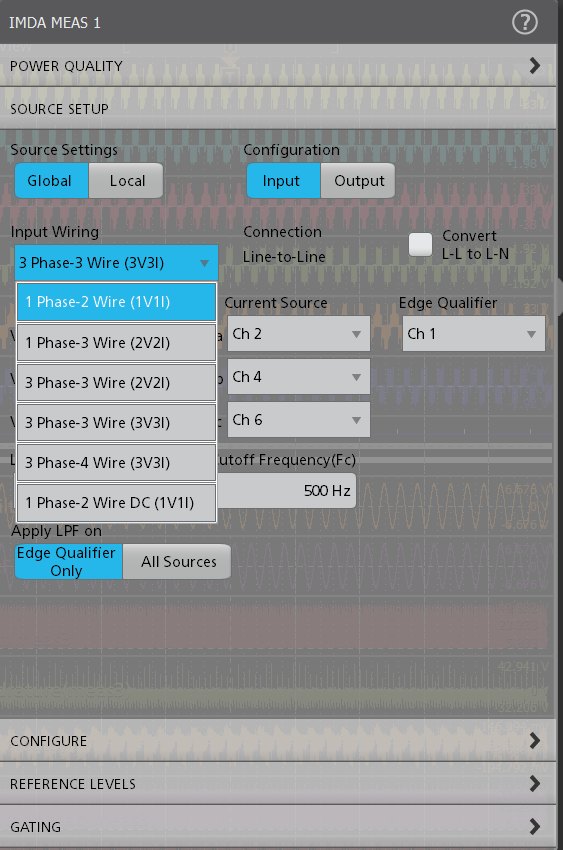
可変周波数ドライブなどの三相パワー・コンバータでは、設計プロセスにおいて数多くの測定が必要になります。5シリーズ/5シリーズB/6 シリーズB MSO用のインバータ、モータ、ドライブ解析パッケージは、電気解析グループの主要な電気測定を自動化します。測定項目を設定することで、入力または出力結線構成を測定できます。
1V1I(単相2線)、2V2I(単相3線)、2V2I(三相3線)、1V1I(単相2線DC)、または 3V3I(三相3線)、3P4W(三相4線)などの測定を設定できるため、さまざまな電源構成やモータ構成に対応できます。さらに、線間(L-L)またはライン-ニュートラル(L-N)の測定も行えるため、デルタ結線やYまたはスター結線にも対応できます。
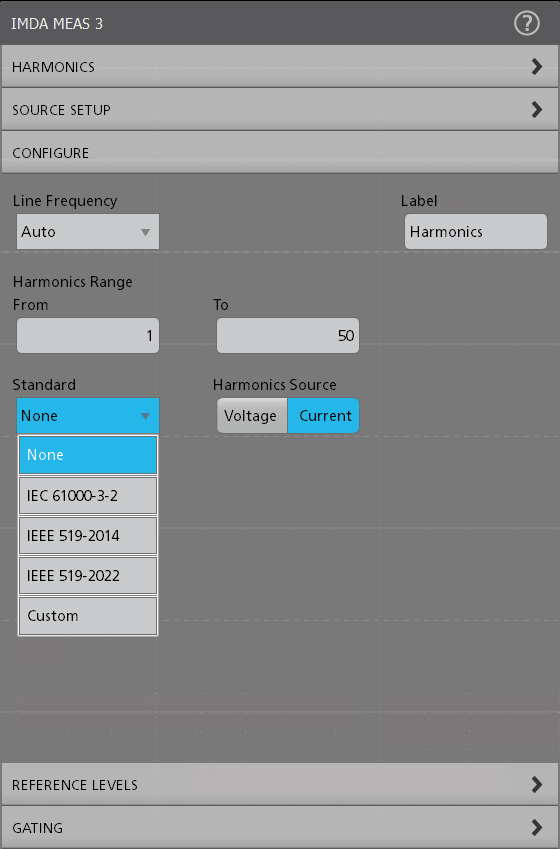
高調波
電力波形がきれいな正弦波のようになるのは稀です。高調波測定では、非正弦波の電圧または電流波形を、それぞれの周波数と振幅を示す正弦波成分に分解します。
高調波解析では、200次の高調波まで実行できます。必要に応じて、測定構成画面で範囲を指定することで、最大高調波次数を設定することができます。THD-F、THD-R、TDD、基本波は各相について測定されます。測定値は、IEEE 519-2014、IEEE 519-2022またはIEC 61000-3-2規格のほか、カスタム・リミットに対しても評価できます。テスト結果は、パス/フェイル結果を示す詳細レポートに記録できます。
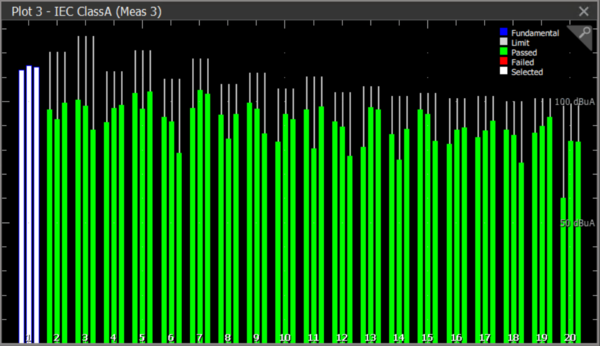
高調波プロットには、三相のすべての試験結果がグループ化されて表示されるため、ユーザはそれぞれの相の試験結果を相関させることができます。また、プロットにはテスト結果が視覚的に示されます。合格条件を満たしていると高調波バーが緑色にハイライトされ、テスト・リミットを超過した場合は赤色にハイライトされます。これにより、高調波設計のデバッグを行う際に、効率的に解析を進めることができます。
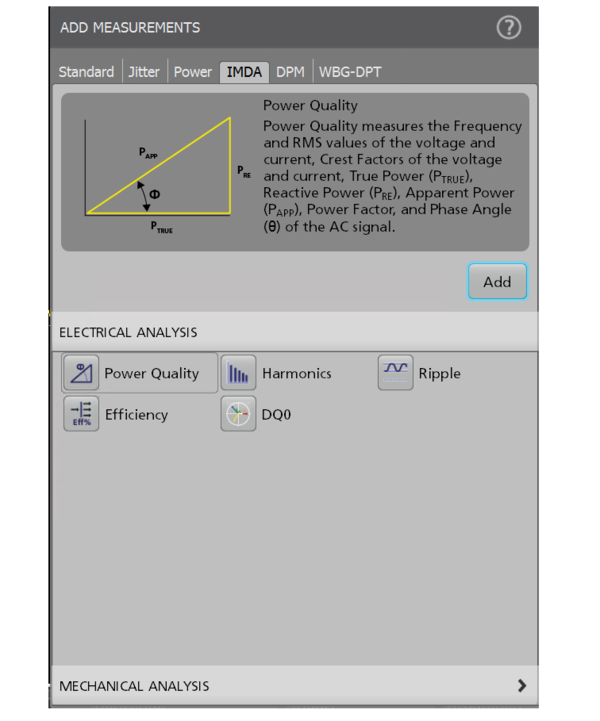
電源品質
この測定では、電圧/電流の周波数とRMS振幅、電圧/電流のクレスト・ファクタ、PWM の周波数、各相の位相角など、三相電力測定の重要な測定を行うことができます。また、有効電力の合計、無効電力の合計、皮相電力の合計も表示されます。
さらに、ライン-ニュートラル結線構成では、三相すべてについて、有効電力、無効電力、皮相電力の成分が表示されます。
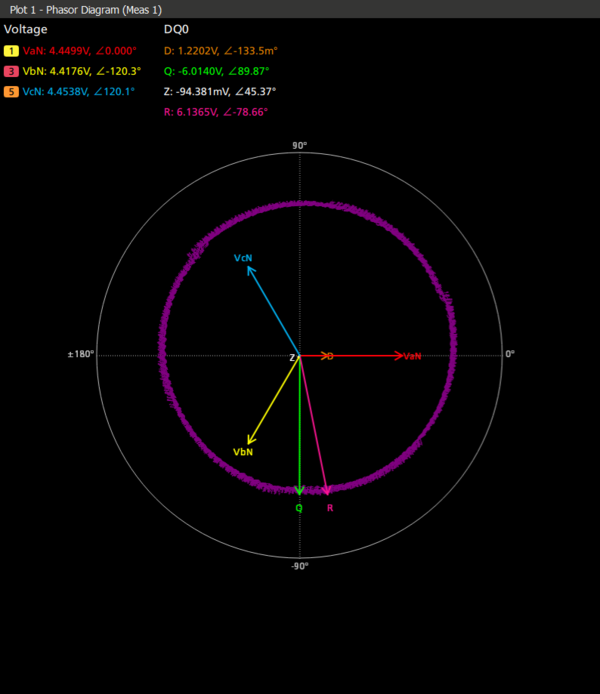
フェーザ図に電圧と電流のベクトルを表示できるので、各相の位相シフトや相間のバランスをすばやく判断することができます。各ベクトルはRMS値で表され、位相は離散フーリエ変換(DFT)法を用いて計算されます。
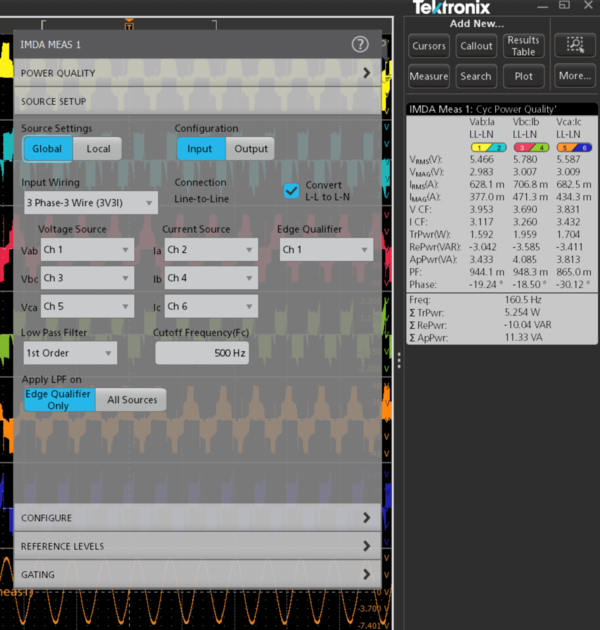
電力品質測定では、電圧/電流の周波数およびRMS振幅、電圧/電流のクレスト・ファクタ、PWM周波数、有効電力、無効電力、皮相電力、力率、および各相の位相角など、重要な三相電力測定を出力側で行えるようにも構成できます。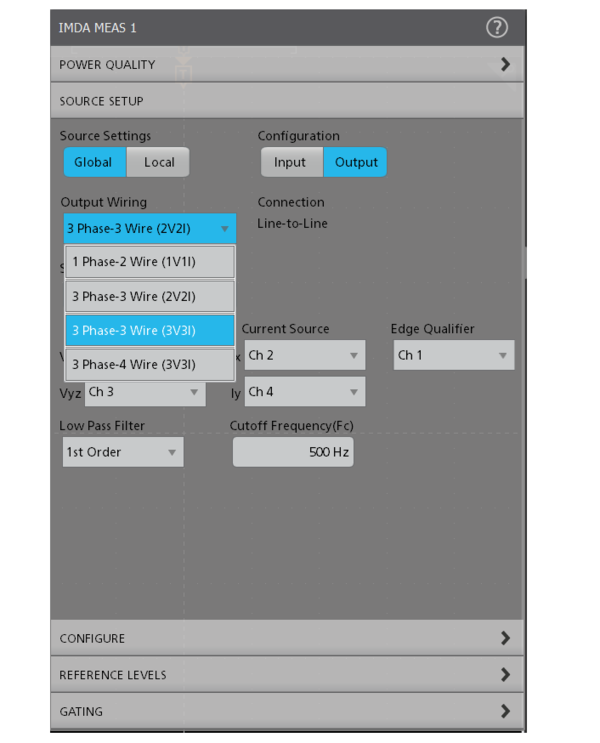
効率
効率は、入力電力に対する出力電力の比率を測定します。IMDAソリューションは、三相ACおよびインバータ構成の効率に対応しています。2V2I法を使用すると、三相効率は8つのオシロスコープ・チャンネル(入力側の2つの電圧と2つの電流ソース、出力側の2つの電圧と2つの電流ソース)を使用して測定します。各相(3V3I構成)における効率と、システムの合計(平均)効率を計算します。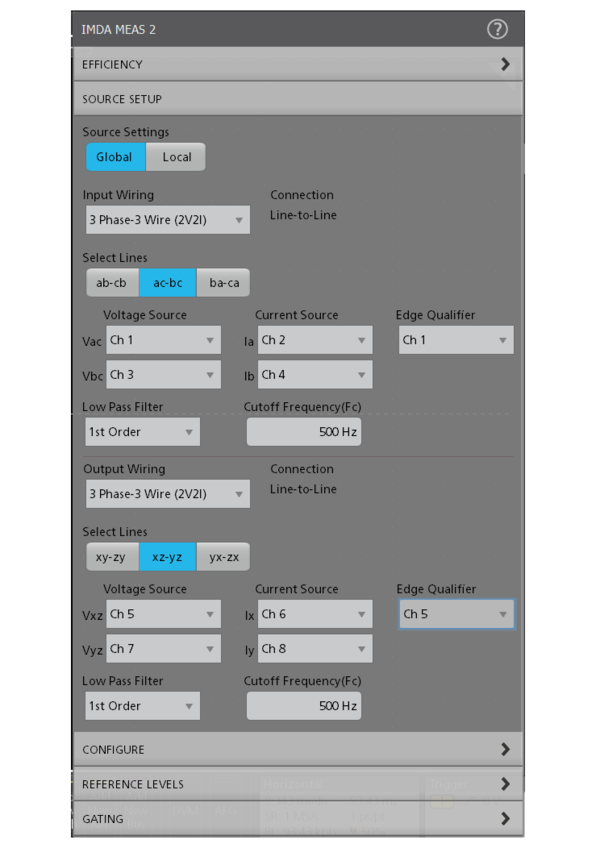
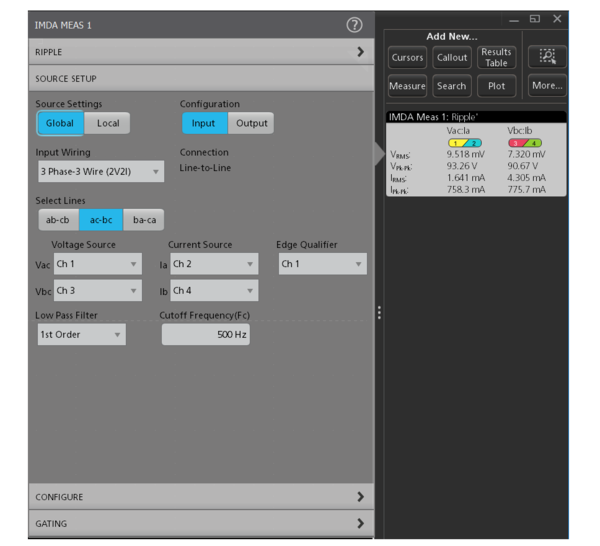
リップル解析
リップルは、一定のDC成分の残留または不要なAC電圧として定義されます。通常はDCバス上で測定されます。この測定は、入力側の AC-DCからの信号効率、出力側のPWM信号の不要な成分の影響を把握するのに役立ちます。

直接直交ゼロ (DQ0) 解析
三相 AC 機器の動作は、以下のように電圧方程式と電流方程式の順番を変えることで説明できます。
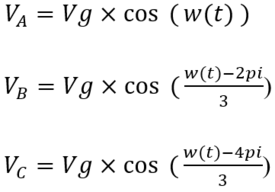
このとき、
A、B、および C は三相 AC 信号です。
Vgは対応するゲインです。
w(t)は 2pi×f×t です。
AC インターフェイスの電圧 (V) と電流 (I) は、通常、120 度位相がずれた状態で分離されます。これらの V および I 構成要素は時間に依存しないため、定常動作ポイントは表現されません。
一般的に、AC 信号は実際の信号ですが、DC に変換することで、直接直交変換を抽象的に表現できます。DQ0 はコントローラーのエミュレートをサポートします。この情報により、コントローラーが実行していることを理解して、コントローラーの設計を調整することができます。
通常、DQ0 変換は AC 波形の基準フレームを回転させて DC 信号に変換します。これにより、逆変換を実行する前に DC 信号の計算を簡素化して、実際の三相 AC 結果を復元できます。
制御システムの出力を測定および監視するために、設計者は FPGA および ASIC ベースのハードウェアを使用してセンサーデータを処理し、DQ0 情報を取得してから、複数回反復して制御情報をチェックします。このソリューションは、複雑で時間がかかります。
D-Q-0 信号を測定または調査することは、実際には困難です。一般的なソリューションでは、コントローラーに外的刺激を提供して、コントローラー入力信号と AD コントローラー (ADC) 出力を DQ0 信号として再現します。
この課題に対処するために、ユーザーはソフトウェア・アプリケーション DQ0 ソリューションによって、電源制御システムの複雑な動的現象を認識できます。
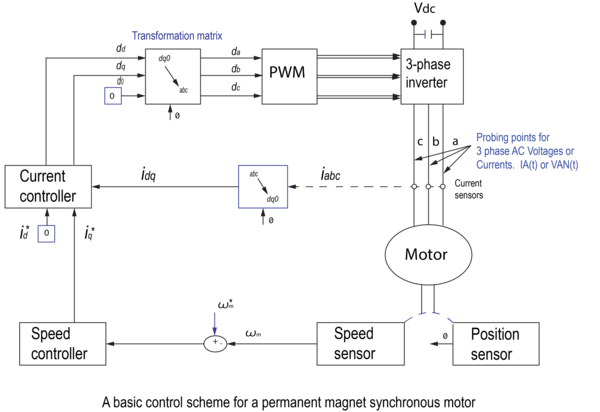
IMDA ソリューションは、DQ0 変換を採用しており、三相波形の基準フレームを回転させて、DC 信号にします。これらの DC 量の計算は、反転して実際の三相 AC 結果を取得する前に簡略化できます。以下の図は、基本操作方法を示しています。
Tektronix は電気解析測定カテゴリーの DQ0 と呼ばれる特許取得済みの測定を提供しています。これは、クラークとパークの変換マトリックスを使用した追加オプションとして提供されています。DQ0の機能は、5シリーズ、5シリーズB、6シリーズB MSOのオプションである5-IMDA-DQ0/6-IMDA-DQ0 として利用可能です。
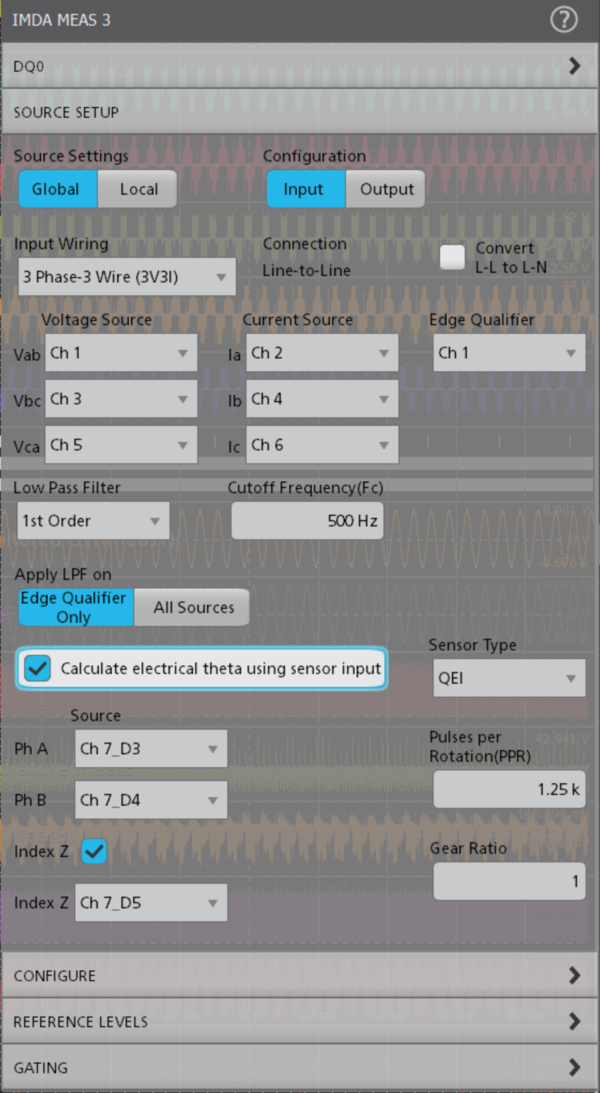
DQ0 メソッドは、角度 (θ) を 2*pi*f*t として計算し、時間変化する信号が予測される場所に基づいて基準フレームを外挿します。DQ0 フレーム (位相図) は、適切な速度と周波数で回転し、必ずしもローターと位相が合っているわけではないため、モーターの瞬間的な状態を把握するのに役立ちます。
この測定は 3V3I 構成に対応しており、モーターから三相の電圧または電流信号を取り込み、D-Q-0 係数に変換します。これがモーター設計エンジニアの強力なデバッグ・ツールとして機能し、PWM 制御回路設計のチューニングが可能になります
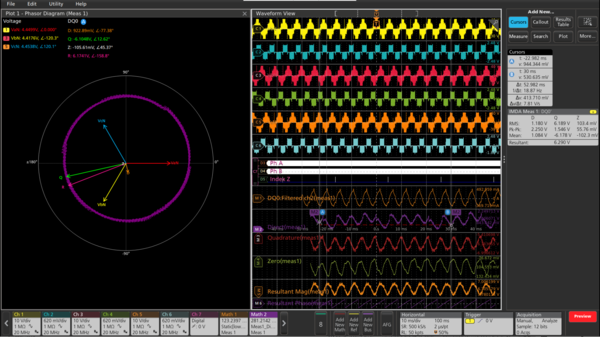
この測定では、三相ドライブ出力電圧または電流波形を変換することにより、リアルタイムで DQ0 変換を計算します。変換マトリックスは、時間変化する AC 信号を時間変化のない DC 成分に変換します。これにより、瞬時のモーター・トルクと回転数に関する制御システムの認識を再現することができます。DQ0 変換を使用すると、モーター設計者は三相電力部の性能を相関させて、ハードウェア・アルゴリズムおよびデザインのシステムを制御することができます。重複した DQ0 および三相 ABC ベクトルは、優れたデバッグ機能として動作し、設計者は同じプロット上で両方のベクトル軸を同時に観察できます。
この測定には、D と Q の振幅を持つスカラ値、統計付き RMS 値、派生した演算波形、位相図など、さまざまな出力があります。演算波形は、DC 変換された波形を提供します。これにより、制御システム出力のさまざまなビューが 1 つの画面に表示されます。
DQ0 の結果を観察することで、RMS リップルを示す変動、ピーク・ツー・ピーク値、高次高調波など、いくつかの重要な推論を導き出すことができます。これらのパラメーターは、制御システム内のアルゴリズムの動作を理解することに直接関係します。この情報がないと、モーター制御システムの性能を理解することが困難になります。
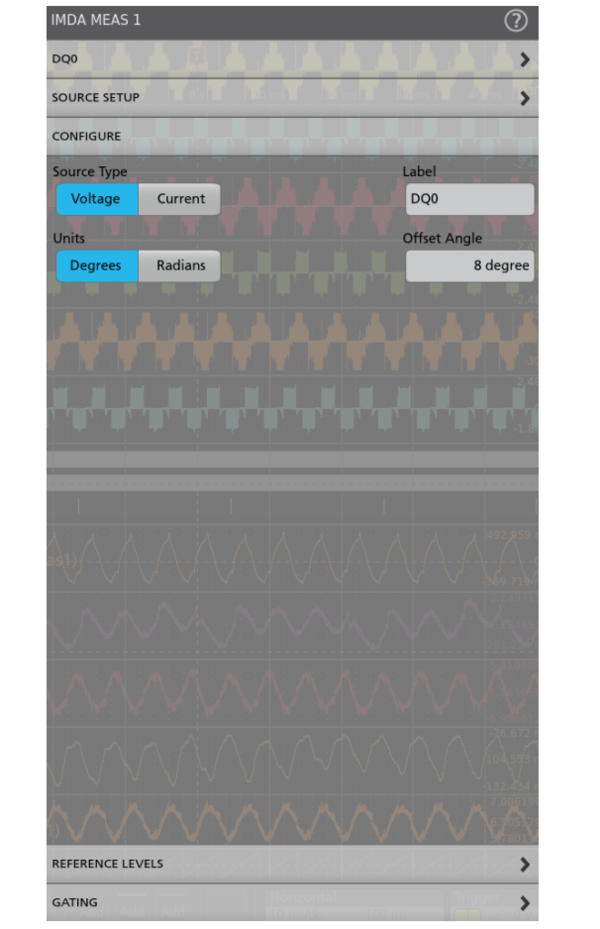
オフセット(電気)角の設定:
- 搭載されているエンコーダ/センサの位置ずれがある場合に調整します。
- 電気信号にフィルタを適用した後にロー・パス・フィルタの遅延がある場合。
これはセンサ構成がある場合もない場合もサポートされます。アナログ・ソースが電気的測定用に設定され、デジタル・ソースが機械的測定用に設定されている場合は、ロー・パス・ フィルタの位相遅延と位置ずれをオフセット角として組み合わせて入力します。
拡張 DQ0 アルゴリズムは、D 成分と Q 成分から合成ベクトルを計算し、合力ベクトルをオーバーラップしたモーター回転として表示し、瞬時モーター角度 (シータ) と統合します。
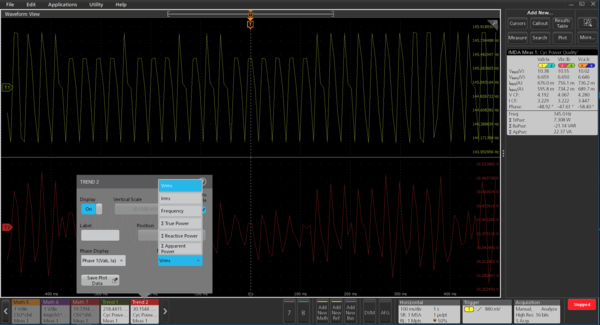
トレンド解析によるダイナミック測定
モータ・ドライブ解析の一般的な要件は、さまざまな負荷条件下でDUTの動作を監視できるように、より長いテスト時間とレコード長で、より多くの取込みを行いながら、モータの応答を観測できるようにすることです。このようなダイナミック測定は、最適な設計の理解に役立ちます。また、電圧、電流、電力、周波数などのパラメータ間の相互の関係、負荷条件におけるそれぞれのパラメータの変動の理解にも役立ちます。特定の領域をマニュアルでズーム、取込み、波形の特定の領域におけるテスト結果を見ることができます。
IMDAソリューションには、電力品質測定において2種類のユニークなトレンド・プロットがあり、このような要件に対応します。
- 時間トレンド・プロット
- アクイジション・トレンド・プロット
それぞれのプロットには特長があり、電力品質測定の下にある、対応するサブ測定のプロットで使用できます。時間トレンド・プロットは、サイクルごとの、または取り込んだ波形(レコード)ごとの測定値のトレンドを表示します。アクイジション・トレンドでは、レコードごと、アクイジションごとの測定値の平均値を表示します。アクイジション回数は、テスト設定時に設定可能です。そのため、ユーザーは長いデータ・レコードを取り込み、詳細なレコード解析を行うことでモーター応答のダイナミックな動作を把握することができます。プロットはCSVフォーマットで保存できるため、後処理が可能です。
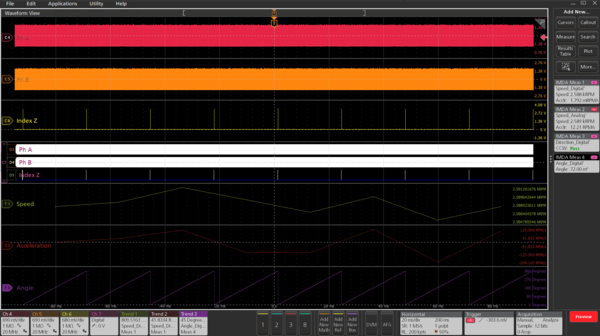
メカニカル解析
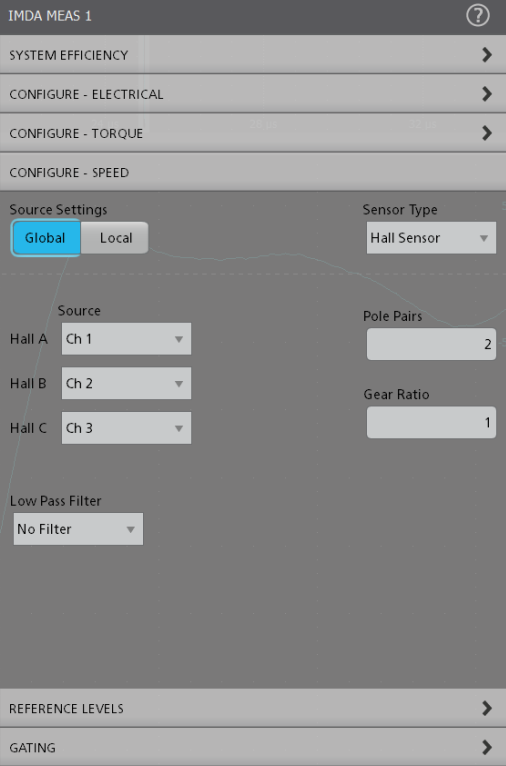
IMDA メカニカル解析グループ (オプションの IMA-MECH) は、ホール・センサー、レゾルバ、および QEI 出力信号をサポートして、速度、加速度、および方向情報を計算します。これらの測定に加えて、QEI方式は角度測定もサポートしており、角度またはラジアンで表示されます。加速度の結果は、速度測定の一部として報告されます。測定には、主要なモーター・パラメーターを測定するために、極ペアの数と対応するギア比が必要です。方向測定では、動作前に一連のホール・センサー立ち上がりエッジが設定され、動作中に検証されることを想定しています。QEI方式では、測定には QEI 出力(位相A、位相B、オプションのZインデックス・パルス、一回転当たりのパルス(PPR))に関する情報が必要です。
TPP1000 受動プローブまたは高電圧差 THDP0200/100 プローブを使用して、モーター出力電力およびノイズ・レベルに応じてセンサー出力を取り込むことができます。アナログの代わりに TLP ロジック・プローブを備えたデジタル・チャンネルを使用することを推奨します。ノイズが少なく、他のテスト操作でアナログ・チャンネルを節約し、測定に単一のフレックスチャネルを使用することもできます。
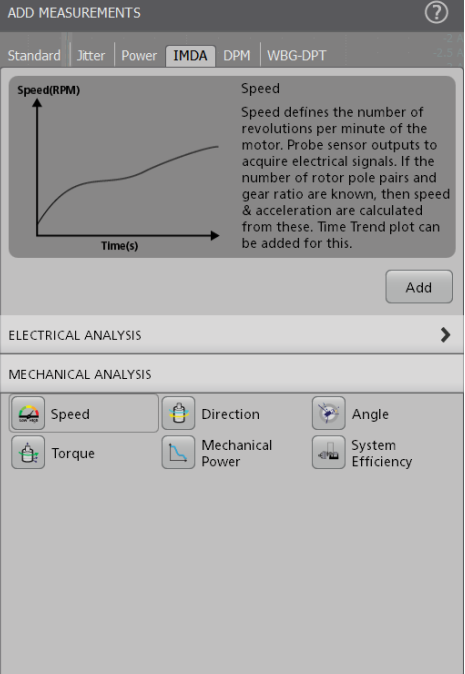
速度測定
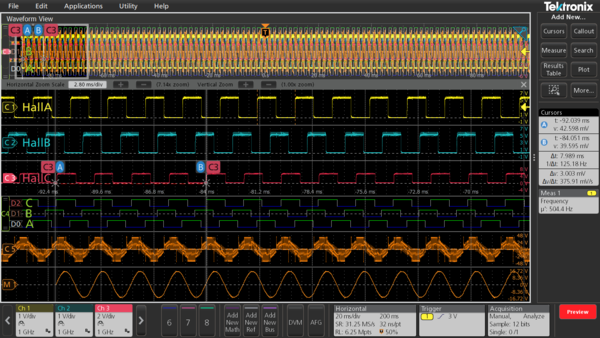
次の図にホール・センサー信号遷移を示します。
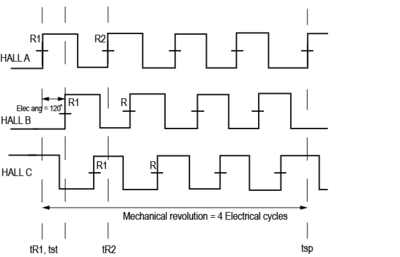
速度は次の式で定義されます。

このとき、
TSPとTSTの差は、極ペアの数によって定義されます。
TSTは電気パルスが以下に当てはまる時の開始です
TSPは電気パルスが以下に当てはまる時の停止です
60 は RPM (回転数/分) です。
G はギア比です。
速度測定は回転ごとまたはQEIセンサ信号サイクルごとに計算することができます。
加速度測定
加速度は、単位時間あたりの速度変化率です。次のように定義されます
速度と方向は次のプロットをサポートします。
- ヒストグラム
- 時間トレンド
- ACQ トレンド
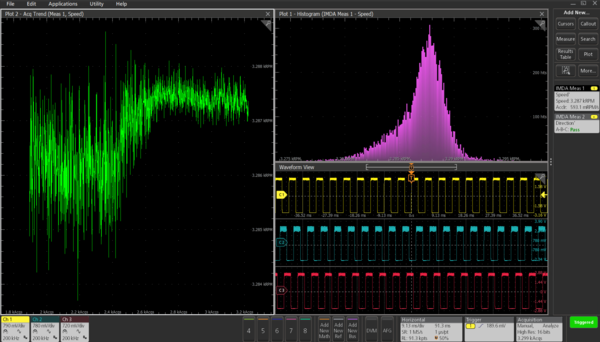
速度 ACQ トレンド・プロットの重要性
ACQ トレンドとヒストグラム・プロットは、モーター速度のジッターを表示します。表示しない場合は、フラッター・メーターなどの専用機器を使用して測定する必要があります。このジッター情報 (エッジのタイミングの変動) は、モーター速度の一貫性を測定します。
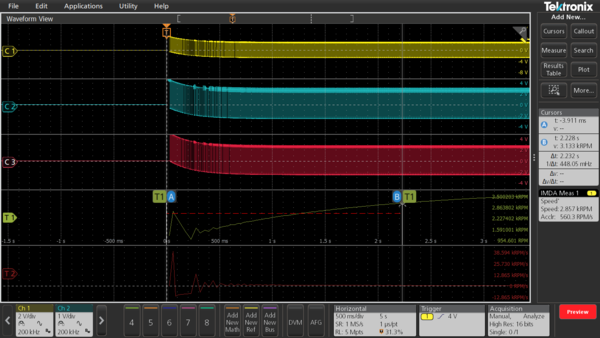
モーター始動プロファイル
モーター設計者は、設計段階でモーター始動プロファイルを調査することに関心があります。時間トレンドは、測定が困難なモーターの瞬間的な速度情報を提供します。
次のモーターの始動シーケンスを示す時間トレンド・プロットの画像では、オフからオン状態になるまでにモーターが要する始動時間は 2.3 秒であることを表しています。同様に、停止状態に移行するモーターの減速を示す時間トレンド・プロットの画像では、オンからオフ状態にすると、減速プロセスに関する情報が得られることが示されています。

方向測定
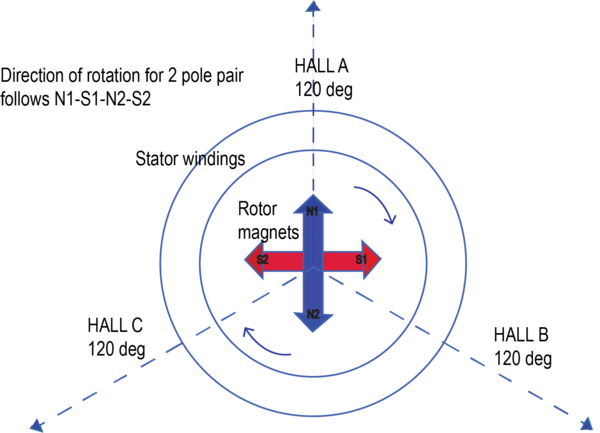
ドリル、洗濯機、電動ポンプなどの用途では、モーターを作動させて方向をすばやく変える必要があります。方向測定は、この解析が役立ちます。ホール・センサー出力の立ち上がりエッジまたは立ち下がりエッジの順序によって、回転方向が決まります。方向測定には、3 つすべてのホール信号が必要です。これらの信号は方向測定に設定可能なパラメーターとして使用でき、モーターの動作中に検証されます。一般に、A-B-C シーケンスは時計回り (CW) と解釈され、A-C-B シーケンスは反時計回り (CCW) として解釈されます。
たとえば、最初の立上がりエッジがHALL(ホール)Aからで、HALL(ホール)Bの立上がりエッジが120度の場合、ロータの回転シーケンスはA-B-Cになります。また、HALL(ホール)Cの2番目の立上がりエッジが120度で発生する場合、シーケンスはA-C-Bになります。
ここでは、方向情報の計算に使用される式を示します。
位数(時計回り)=(A-B-C)
位数(反時計回り)=(A-C-B)
ここで、位数関数は3つのHALL Sensor(ホール・センサ)信号すべての立上がりエッジのシーケンスをチェックします。
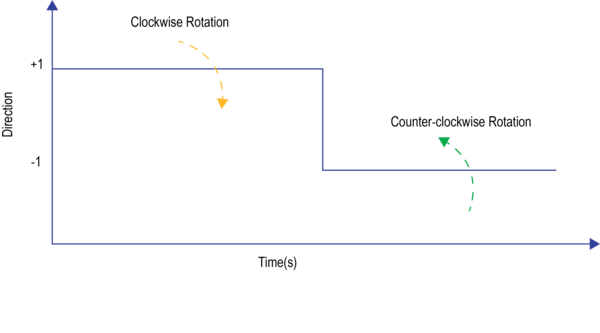
モーターがデバッグ中に方向を反転した場合、正確なタイムスタンプを視覚的に示すために、ACQ トレンド・プロットとして方向を表示できます。これは、次の図にサンプル・プロットとして示されています。
レゾルバ
レゾルバは、ロータの角度位置を決定するためにモータに取り付けられたセンサの一種です。
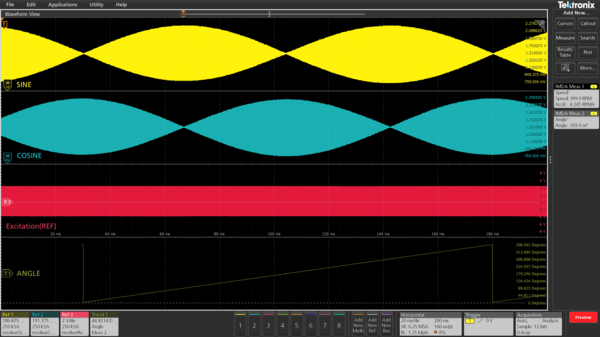
レゾルバは3つの信号出力を生成します。リファレンスとして使用される励起、分析に使用されるサインおよびコサインです。サイン信号およびコサイン信号は互いに直交し、リファレンス信号により調整されます。サイン・エンベロープおよびコサイン・エンベロープは、さまざまなパラメータを計測する前に取得されます。
レゾルバのサポートにより以下の測定項目が利用可能です。
瞬間的な角度の測定:
角度 = 逆正接(sin値/cos値)
速度の計算式は
速度 = [周波数(エンベロープ信号)/極ペア] Hz
ここで、エンベロープ信号はエンベロープ抽出の出力です。
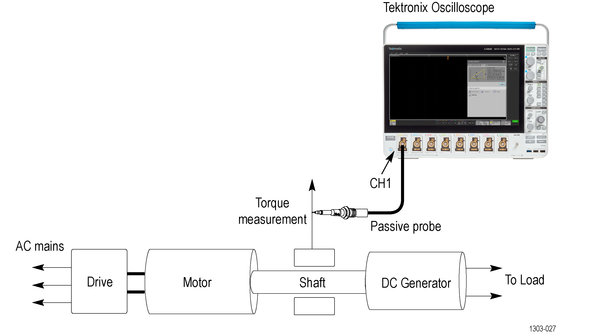
トルク測定
モーターのトルクは出力シャフトで発生する回転力です。この力はニュートン・メートル (Nm) で測定されるねじれ力です。
IMDAは、トルク測定に適した次の2つの方式をサポートしています。
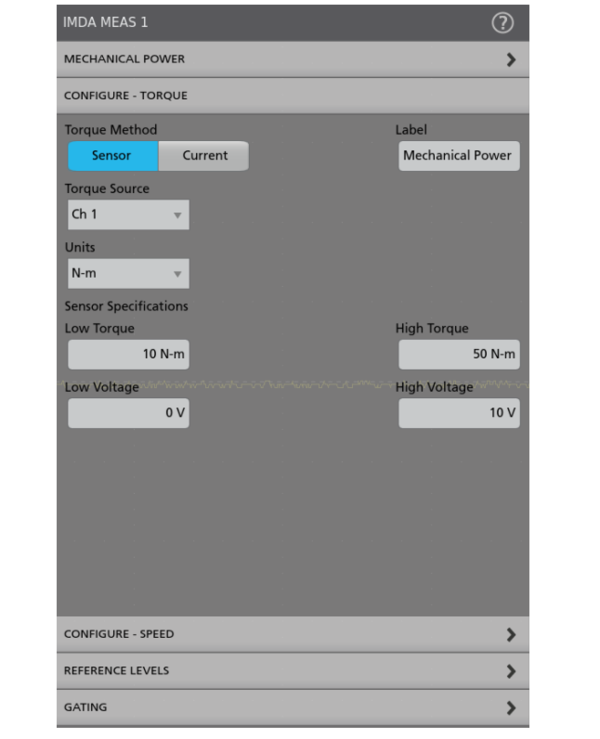
- センサ方式:
これは、トルク・センサーまたはロード・セル出力を使用する最も一般的なトルク測定方法です。モーターが生成したトルクの測定は、回転トルク・センサーをモーター・シャフトに合わせてカップリングすることで行うことができます。ユーザーは受動電圧プローブを使用してトルク波形を補足できます。電圧波形は、測定したトルク値に比例します。
ユーザーは、トルク・センサーの上限値と下限値、および出力電圧の対応する上限値と下限値を設定する必要があります。測定は、取得した電圧波形をトルク値に再スケーリングします。
ロード・セルは力を生じさせます。トルク値は、力の積およびアームの長さ (距離) として計算されます。

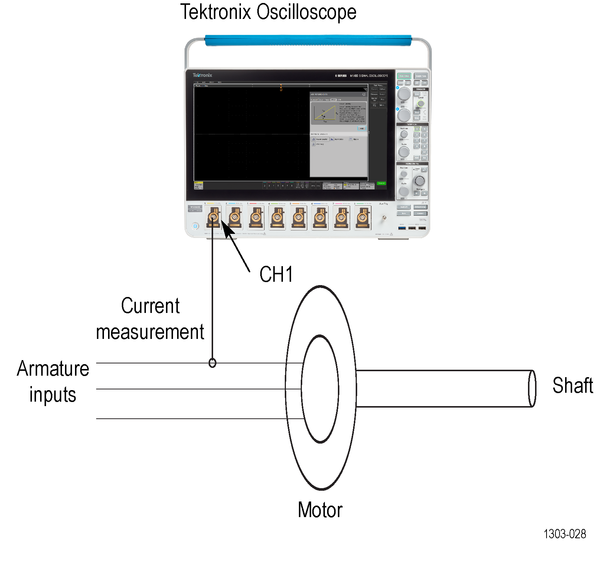
- 電流方式:
多くのモーターにはデータ仕様があり、トルク定数を使用して、適用した RMS 電流に比例してトルクを推定できます。これはトルク値の推定値です。
一般的に、DC モーターで発生するトルクは、電機子電流のトルク定数時間に比例します。直列モーターでは、フィールド電流は電機子電流に比例します。
ローターによって生成されるトルクは、電機子電流に正比例すると推定されます。ユーザーはモーターのトルク定数を設定する必要があります。
トルク = トルク定数 x IRMS

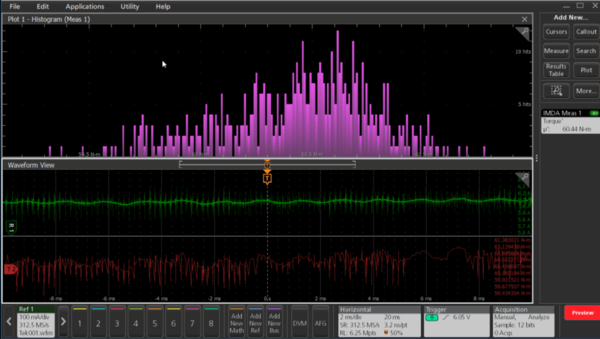
トルク測定では、次のプロットがサポートされます。
- ヒストグラム
- 時間トレンド
- ACQ トレンド。
次のトルク単位が設定の一部になります。
- ニュートン・メートル (N·m)
- フィート・ポンド (ft·lb)
- インチ・オンス (in·oz)
- インチ・ポンド (in·lb)
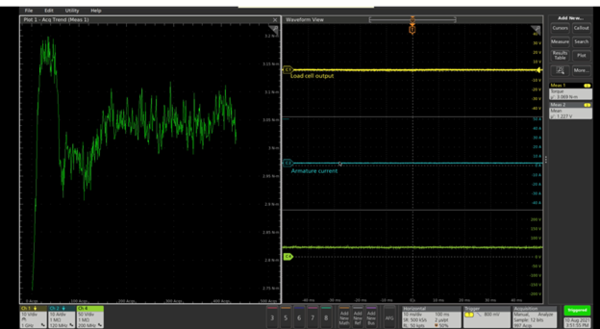
機械電力の測定
回転するシャフトの機械電力は、回転速度とシャフトが生み出すトルクにより定義されます。この計測はホール・センサとQEIエンコーダをサポートし、速度とトルクを計算します。
機械電力測定は、トルク・センサまたはアーマチュア電流入力を使用してトルクを計算し、ホール・センサまたはQEIセンサの入力を使用して速度を計算します。これらの入力値を使用して計算された機械電力は、シャフトの速度とトルクの積に正比例します。
IMDAは、モータのトルク、速度、角度位置を測定するために、さまざまなセンサ・タイプをサポートしています。
機械電力 = (トルク * マルチプライヤ) * 速度
マルチプライヤがトルク・ユニットに基づき、104.7252 nm、0.739522 oz-inch、141.9883 ft-lb、または11.83235897 inch-lbとなりうる場合。
速度の単位はRPMです。
機械電力の単位はワットです。
システム効率の測定
システム効率は、電気的エネルギーを機械的エネルギーに変換する効率を測る基準です。この計測は多くの場合、様々な速度で様々な負荷を掛けて実施され、通常速度トルク曲線として表示されます。
電力効率は、すべての電気機器を評価する基準であるため、動的に測定し、モータが目標の範囲で動作しているか確認することが重要です。
IMDAシステム効率計測は電圧および電流入力を取り込み、入力電力と入力トルク、速度センサ信号を計算して、出力機械電力を計算します。これらのパラメータに基づき、システム効率が計算されます。電力は使用可能なオシロスコープチャンネルに基づき、2V2Iまたは3V3I配線を用いて計算することができます。
電気的に駆動しているモータでは、出力電力は機械的であるものの、入力電力は電気的です。そのため、効率方程式は以下のように計算されます。
システム効率 = ((出力機械的電力)/(入力電気的電力))×100%

レポート生成
IMDAソフトウェアは、データの収集、アーカイブ、設計の文書化、開発プロセスを簡素化します。MHTまたはPDF形式のレポートを作成できるため、パス/フェイル結果の解析が容易になります。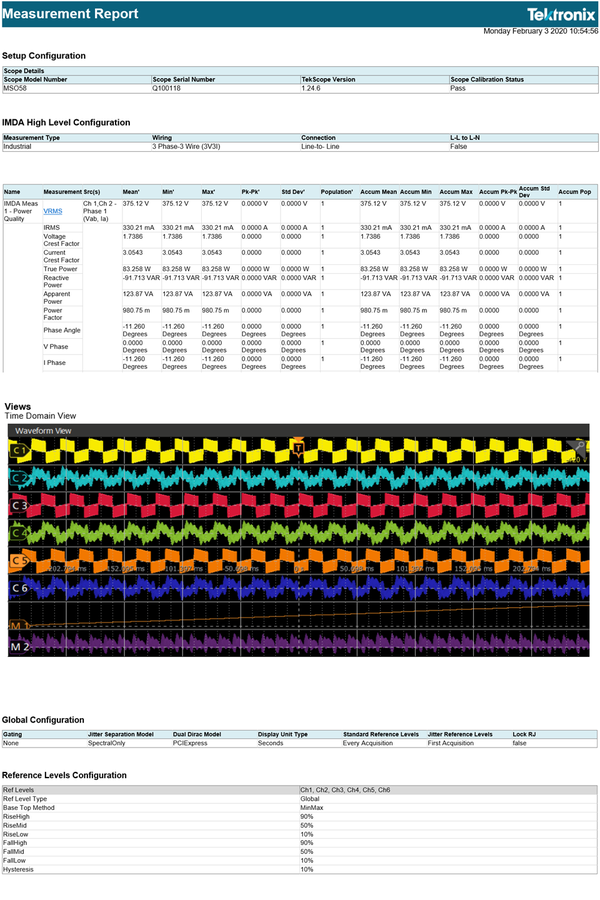
仕様
- 結線の構成
- 1V1I(単相2線)、2V2I(単相3線)、2V2I(三相3線)、2V2I(DC入力-AC出力)、3V3I(DC入力-AC出力) または 3V3I(三相3線)、および3P4W(三相4線)
- L-L - L-N変換
- 三相3線(3V3I)で使用可能1
- 電気解析
- 電源品質、高調波2、リップル、DQ03、効率4
- サポートされているセンサー
- ホール・センサー、リゾルバ、QEI (直交エンコーダ・インタフェース)
- メカニカル解析
- 速度、加速度、角(QEI手法)、方向、トルク、機械出力、システム効率
- 高調波ゲーティング
- 基本的なスペクトルとフル・スペクトラム
- 三相オートセット
- すべての測定項目に対応
- プロット
- 時間トレンド・プロット、アクイジション・トレンド・プロット、フェーザ図、高調波バー・グラフ 5、DQ0 プロット、およびヒストグラム・プロット (速度分布)
- レポート
- MHTおよびPDFフォーマット、CSVフォーマットによるデータのエクスポートが可能
- 消磁/デスキュー(静的)
- プローブの自動検出とオートゼロ機能。各チャンネルのメニューからデスキュー(電圧プローブと電流プローブ)や消磁(電流プローブ)を実行できます。
- 測定ソース
- ライブ信号(アナログ)、リファレンス波形、演算波形
ご注文の際は以下の型名をご使用ください。
型名
| 製品名 | Opt. 6 | 対応機器 | 利用可能な周波数帯域 |
|---|---|---|---|
| 新規に機器購入時のオプション型名 | 5-IMDA | 5シリーズMSO(MSO56型、MSO58型) 5シリーズB MSO(MSO56B型、MSO58B型) MSO58LP |
|
| 製品アップグレード時の型名 | SUP5-IMDA | ||
| フローティング・ライセンス | SUP5-IMDA-FL | ||
| 新規に機器購入時のオプション型名 | 5-IMDA-DQ0 | ||
| 製品アップグレード時の型名 | SUP5-IMDA-DQ0 | ||
| フローティング・ライセンス | SUP5-IMDA-DQ0-FL | ||
| 新規に機器購入時のオプション型名 | 5-IMDA-MECH | ||
| 製品アップグレード時の型名 | SUP5-IMDA-MECH | ||
| フローティング・ライセンス | SUP5-IMDA-MECH-FL | ||
| 新規に機器購入時のオプション型名 | 6-IMDA | 6シリーズB MSO(MSO66B型、MSO68B型) |
|
| 製品アップグレード時の型名 | SUP6B-IMDA | ||
| フローティング・ライセンス | SUP6B-IMDA-FL | ||
| 新規に機器購入時のオプション型名 | 6-IMDA-DQ0 | ||
| 製品アップグレード時の型名 | SUP6B-IMDA-DQ0 | ||
| フローティング・ライセンス | SUP6B-IMDA-DQ0-FL | ||
| 新規に機器購入時のオプション型名 | 6-IMDA-MECH | ||
| 製品アップグレード時の型名 | SUP6B-IMDA-MECH | ||
| フローティング・ライセンス | SUP6B-IMDA-MECH-FL |
ソフトウェア・バンドル
| サポートされる機器 | バンドル・オプション | 概要 |
|---|---|---|
5シリーズ/5シリーズB MSO | 5-PRO-POWER-1Y | Pro Power Bundle(1年更新ライセンス) |
| 5-PRO-POWER-PER | Pro Power Bundle(永続ライセンス) | |
| 5-ULTIMATE-1Y | Ultimate Bundle(1年更新ライセンス) | |
| 5-ULTIMATE-PER | Ultimate Bundle(永続ライセンス) | |
| 5-PRO-AUTO-1Y | Pro Automotive Bundle(1年更新ライセンス) | |
| 5-PRO-AUTO-PER | Pro Automotive Bundle(永続ライセンス) | |
| 6シリーズB MSO | 6-PRO-POWER-1Y | Pro Power Bundle(1年更新ライセンス) |
| 6-PRO-POWER-PER | Pro Power Bundle(永続ライセンス) | |
| 6-ULTIMATE-1Y | Ultimate Bundle(1年更新ライセンス) | |
| 6-ULTIMATE-PER | Ultimate Bundle(永続ライセンス) | |
| 6-PRO-AUTO-1Y | Pro Automotive Bundle(1年更新ライセンス) | |
| 6-PRO-AUTO-PER | Pro Automotive Bundle(永続ライセンス) |
推奨プローブ
| プローブ・モデル | 概要 | 数量 |
|---|---|---|
| TCP0030A または TCP0150 | 電流プローブ | 3本(3V3I結線の場合)7 |
| THDP0200またはTMDP0200 | 高電圧差動プローブ | 3本(3V3I結線)1 |
1 三相4線(3V3I)の場合、接続は常にL-Nであり、三相3線(2V2I)の場合はL-Lです。
2 カスタム・リミットをサポート。
3 3V3I結線でのみ使用可能。
4 2V2I結線でのみ使用可能。
5 測定の構成の一部としてレンジ・フィルタを使用。
6 Opt. IMDA-DQ0およびIMDA-MECHには前提条件としてOpt. IMDAが必要
7 効率測定を行うためには、プローブが4本必要です。
テクトロニクスはISO 14001:2015およびISO 9001:2015(DEKRA認証)を取得しています。 48Z-61649-7
