
Beim Vergleich vergangener, gegenwärtiger und zukünftiger Fahrzeuge ist ein Trend eindeutig: Sie haben sich zu Datenzentren auf Rädern entwickelt. In jedem PKW wächst die Menge der Daten von Sicherheitssystemen, Sensoren, Navigationssystemen etc., sowie die Abhängigkeit von diesen Daten rapide an.
Dies hat erhebliche Auswirkungen auf die fahrzeuginternen Netzwerke (IVNs) in Bezug auf Geschwindigkeit, Kapazität und Zuverlässigkeit. Eine Folge davon: Bei Hochgeschwindigkeitsanwendungen mit geringer Latenzzeit verfügen speziell entwickelte Busse wie Controller Area Network (CAN), FlexRay, Local Interconnect Network (LIN), Media-Oriented Systems Transport (MOST) und Single Edge Nibble Transmission (SENT) nicht über die erforderliche Bandbreite. Daher werden diese alten Standards nach und nach durch bewährte Technologien aus der Welt der Informationstechnologie (IT) ersetzt.
Das heutige Paradebeispiel ist Automotive Ethernet, das vier Standards unter der Leitung des Institute of Electrical and Electronic Engineers (IEEE) umfasst. Bis auf Weiteres wird Automotive Ethernet mit mehreren Bussen koexistieren, die zahlreiche Systeme und Subsysteme umfassen. Folglich sind unterschiedliche Testansätze für die Entwicklung, Validierung, Fehlersuche, Fehlerbehebung, Wartung und Instandhaltung von Fahrzeugen und IVNs erforderlich.
Dieser Leitfaden gibt Ihnen einen Überblick über die Trends, Herausforderungen und Lösungen im Zusammenhang mit der erwarteten künftigen Entwicklung von IVNs. Unser Ziel ist es nicht, Sie zu einem Experten auf diesem Gebiet zu machen. Unser Ziel ist es vielmehr, Ihnen dabei zu helfen, eine Grundlage für ein tieferes Verständnis für das Testen von IVNs zu schaffen. Das Ergebnis: Sie und Ihr Team werden in der Lage sein, neue Entwürfe schneller in Produktion zu bringen, Validierungstests zu rationalisieren, Konformitätstests zu verbessern, Produktionstests zu optimieren und Service- sowie Prüfungen nach der Reparatur zu vereinfachen.
Trends: Verarbeitung von mehr Daten, Ethernet, Standardisierung und die Lebensdauer
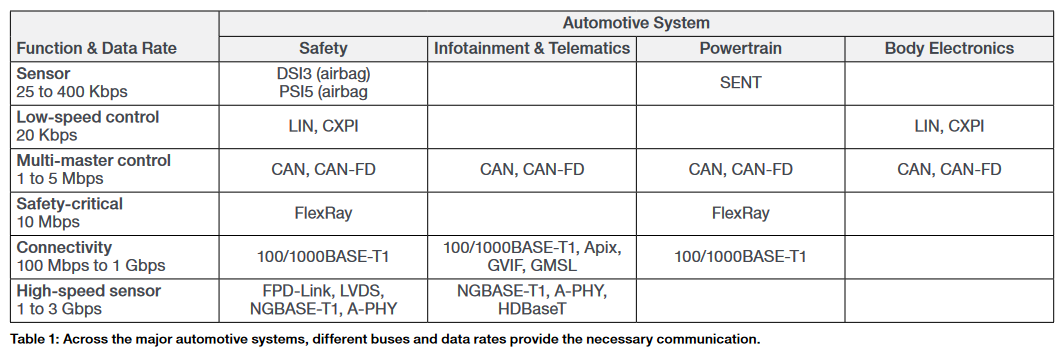
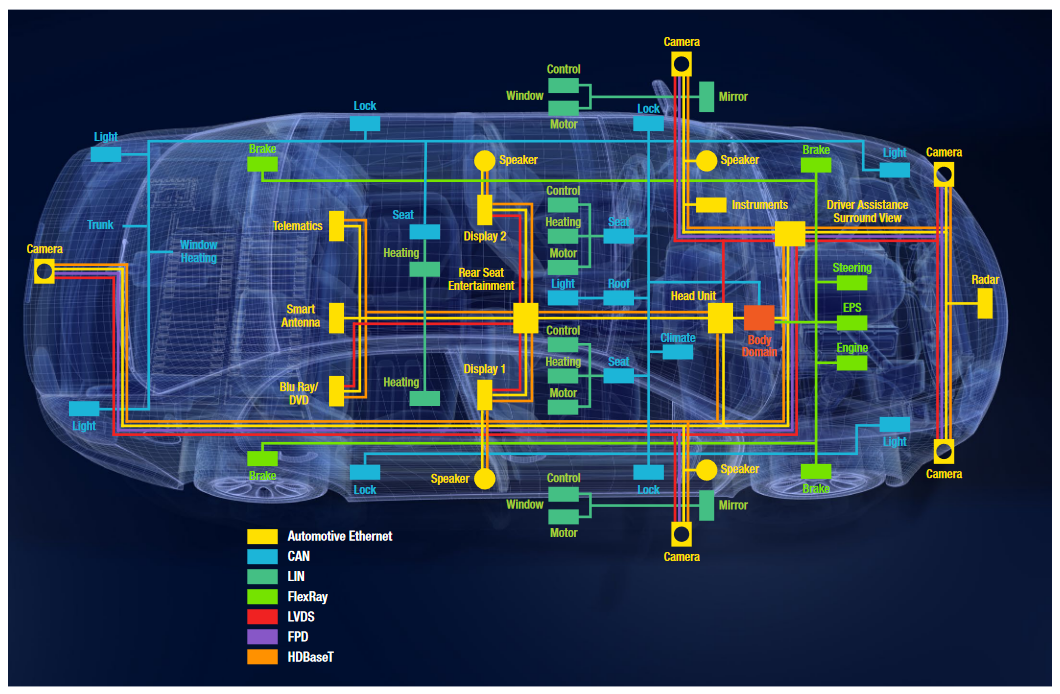
Heutzutage enthalten viele Automobile mehr als 80 elektronische Steuergeräte (ECUs). Bislang haben CAN, LIN, FlexRay, MOST und SENT Informationen zwischen diesen Steuergeräten und einer Vielzahl von Onboard-Systemen übertragen: Motor, Antriebsstrang, Getriebe, Bremsen, Karosserie, Aufhängung, Infotainment und mehr (Tabelle 1). Darüber hinaus liefern zelluläre und nicht zelluläre Funktechnologien (z. B. Bluetooth®, WLAN und GNSS) externe Datenströme an Infotainment-, Navigations- und Verkehrsinformationssysteme.
Der Umgang mit mehr Daten
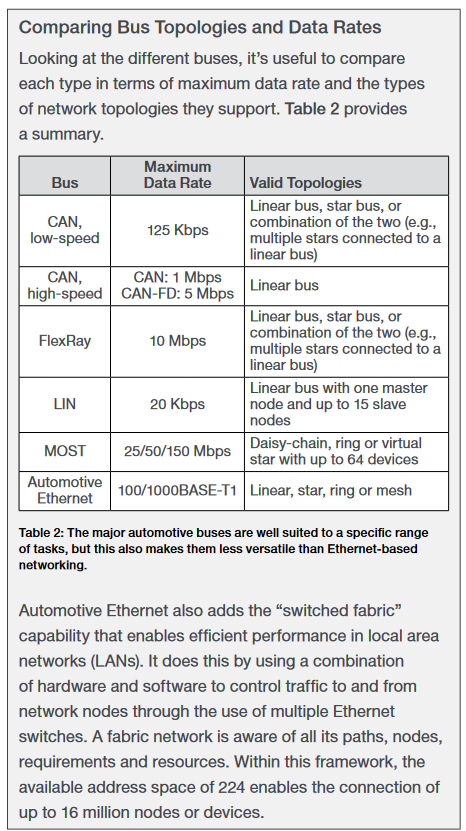
Wir erwarten, dass in den kommenden Jahren mehr als 100 ECUs pro Fahrzeug zum Einsatz kommen werden, wobei die angeschlossenen Fahrzeugnetzwerke viele Terabytes an Daten pro Tag übertragen werden. Wir gehen davon aus, dass Autos weiterhin CAN, CAN-FD, LIN, FlexRay, SENT und MOST nutzen werden; die derzeitigen Spitzen-Datenraten liegen jedoch bei 10 Mbps mit FlexRay und 150 Mbps mit MOST. Der Wunsch, einfach „schneller zu werden“, ist leichter gesagt als getan: Der weitverbreitete CAN-Bus müsste massiv umgestaltet werden, um die erforderliche Geschwindigkeit, Sicherheit und Abwärtskompatibilität zu gewährleisten.
Da die Sensoren immer zahlreicher und empfindlicher werden, werden sie auch enorme Datenmengen erzeugen: Stellen Sie sich 10 bis 20 Kameras vor, die einen 360-Grad-Blick bieten, wobei alle in 1080p (jetzt) oder 4K (in Zukunft) HD-Streams senden, mit einer Pixeltiefe, die von 16 auf 20 oder sogar 24 Bit steigt. Die Zahlen summieren sich rasant: Eine einzige 4K-Kamera mit 24-Bit-Pixeltiefe würde 199 MB pro Bild bei einer Rate von 10 bis 30 Bildern pro Sekunde erzeugen. Auch wenn 1 Gbit/s jetzt noch ausreichen mag, werden 10 Gbit/s bald unverzichtbar sein (Abbildung 1).
Derzeit verwenden IVNs Vorverarbeitungshardware, um die Datenreduzierung (d.h. Komprimierung) am Sensor durchzuführen. Leider führt dies zu Latenzzeiten, die sich auf die Reaktionszeit auswirken und gleichzeitig die Bildqualität beeinträchtigen, wodurch die nützliche Erfassungsreichweite eingeschränkt wird. Eine sich abzeichnende Lösung ist das Streaming von Rohdaten mit 2 bis 8 Gbit/s zu zentralisierten Systemen auf einem Chip (SoCs) oder allgemeinen Prozessoreinheiten (GPUs), die die eingehenden Echtzeitdaten verarbeiten können. IVNs bewegen sich von einer flachen Architektur zu einer Domain-Controller-Architektur, bei der Sensoren die Rohdaten an die zentrale Prozessoreinheit übertragen.
Die erforderlichen Kommunikationsströme werden erweitert und entwickeln sich mit Vehicle-to-Infrastructure (V2I), Vehicle-to-Vehicle (V2V) und Vehicle-to-Everything (V2X) weiter. Sie alle werden eine wichtige Rolle für den Fahrzeugbetrieb und die menschliche Interaktion spielen.
Verlagerung zu Automotive Ethernet
In Automobilanwendungen erfordert die optimale Nutzung von Daten einen schnelleren Datendurchsatz, geringere Latenzzeiten, größere Zuverlässigkeit und eine höhere Servicequalität (QoS), um einen sicheren und zuverlässigen Betrieb des Fahrzeugs zu gewährleisten. Mit Geschwindigkeiten von bis zu 10 Gbit/s wird Automotive Ethernet eine zunehmend wichtige Rolle bei der Übertragung von Hochgeschwindigkeitsdaten spielen: IEEE 802.3cg, 10BASE-T1, 10 Mbps; IEEE 802.3bw, 100BASE-T1, 100 Mbps; IEEE 802.3bp, 1000BASE-T1, 1 Gbps; und IEEE 802.3ch, 10GBASE-T1, 2.5/5/10 Gbps.
Angesichts der verfügbaren Datenraten und des wachsenden Bedarfs an dieser Leistung sowie des Wunsches, das Gewicht der Verkabelung zu reduzieren, haben viele Branchenexperten optimistische Prognosen über die Akzeptanz von Automotive Ethernet und die Anzahl der verbundenen Knoten im Fahrzeug abgegeben.
Standardisierung: Einen neuen Geschäftsvorteil schaffen
Im Laufe der Geschichte der Automobilindustrie hat sich eine bewährte Praxis nicht geändert: die Standardisierung. Diese Idee wird auch in Zukunft Bestand haben, da sie wichtige Vorteile bietet, wie z. B. einen stärkeren Wettbewerb zwischen den Anbietern, geringere Kosten für Komponenten und garantierte Interoperabilität.
Beispiele für die Standardisierung im Bereich der IVNs der neuen Generation sind Automotive Ethernet, MIPI A-PHY und HDBaseT Automotive. Durch den Einsatz bewährter Technologien aus der IT-Welt wird die Automobilindustrie erhebliche neue Geschäftsvorteile erlangen, da zukünftige Fahrzeuge zu Datenzentren auf Rädern werden.
Lebenszyklus: Testen von der Entwicklung bis zur Wartung
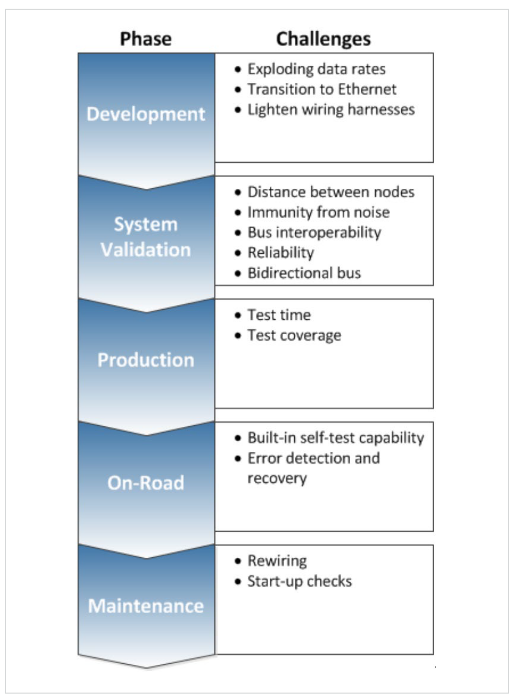
Je autonomer Fahrzeuge werden, desto schwerwiegender sind die möglichen Folgen eines Systemausfalls. Um einen sicheren und zuverlässigen Betrieb solcher Systeme zu gewährleisten, gewinnt das Testen von fahrzeuginternen Netzwerken während des gesamten Lebenszyklus des Fahrzeugs an Bedeutung (Abbildung 2). Die sorgfältige Auswahl von Werkzeugen für die Systementwicklung und von IVN-Testlösungen, die den Anforderungen aller verschiedenen Phasen des Lebenszyklus eines Fahrzeugs gerecht werden, bietet Tier-1-Zulieferern, Automobilherstellern und Fahrzeugnutzern weitreichende Vorteile.
Herausforderungen: Testen mehrerer parallel laufender Busse
Heutzutage verfügen Fahrzeuge über eine Vielzahl von gleichzeitig arbeitenden Kommunikationsbussen. Aus diesem Grund sind Systemoptimierung und Fehlersuche schwierig und zeitaufwändig. Der parallele Einsatz all dieser Technologien auf dem begrenzten Raum eines Fahrzeugs kann zu elektromagnetischen Störungen (EMI), schlechter Signalqualität und möglicherweise zu kritischen Systemausfällen führen.
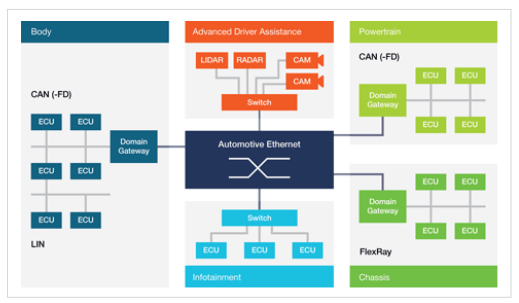
Die Prüfung von fahrzeuginternen Netzwerken erfordert Zuverlässigkeitsprüfungen innerhalb und im gesamten Fahrzeug: Interoperabilität, Störfestigkeit, Übersprechen und Störquellen. Die Überprüfung der Funktionsfähigkeit und Kommunikationszuverlässigkeit erstreckt sich auf alle steuergerätegesteuerten und busverbundenen Systeme im Fahrzeug (Abbildung 3). Da die Fahrzeuge immer datenintensiver werden, sind Tests für einen sicheren und zuverlässigen Betrieb in allen Phasen des Lebenszyklus unerlässlich: Entwicklung, Validierung, Produktion, Wartung und Service.
Test-Herausforderung Nr. 1: Fehlersuche bei Bus-Problemen
CAN, LIN und FlexRay sind relativ ausgereifte Busprotokolle und wurden so konzipiert, dass sie robust und einfach zu integrieren sind. Dennoch kann die Kommunikation im Fahrzeug durch Rauschen, das Platinenlayout und das Einschalt-/Ausschalttiming beeinträchtigt werden. Zu den Problemen können übermäßige Busfehler und Blockaden gehören.
Bei CAN, LIN und FlexRay gehören die Fehlersuche bei Signalfehlern, das Debuggen des dekodierten Protokolls und der Umgang mit mehreren Kanälen, Sensoren und Aktoren zu den häufigsten Problemen. Bei SENT ist es schwierig, zunächst ein Oszilloskop für die Dekodierung von SENT-Nachrichten mit schnellem und langsamem Kanal zu konfigurieren und dann auf die dekodierten Informationen zu reagieren.
Wie bereits erwähnt, können mehrere Busse, die gleichzeitig auf engstem Raum in einem Fahrzeug betrieben werden, EMI erzeugen, was zu einer schlechten Signalqualität führen kann. Pre-Compliance-Tests können Ihnen dabei helfen, die Ursache von Problemen mit der Signalqualität und der Bus-Leistung zu isolieren und zu identifizieren. Außerdem verbessern Sie damit Ihre Voraussetzungen, die formale Prüfung von EMI und elektromagnetischer Verträglichkeit (EMV) gemäß den relevanten Normen wie CISPR 12, CISPR 25, EN 55013, EN 55022 (ersetzt durch EN 55032) und 47 CFR 15 zu bestehen.
Test-Herausforderung Nr. 2: Verifizierung der elektrischen Konformität
Die Gewährleistung eines zuverlässigen Datenflusses mit geringer Latenzzeit zum, vom und innerhalb des Fahrzeugs ist für den sicheren Betrieb des gesamten Systems unerlässlich. Im Gegensatz zu CAN, LIN und anderen gibt es für Automotive Ethernet eine komplexe Reihe von Konformitätstests, die von IEEE und OPEN Alliance definiert wurden und elektrische Anforderungen beinhalten, um die Einhaltung des Standards zu gewährleisten. Diese Tests werden häufig während der Entwicklung, Validierung und Produktion durchgeführt.
Beim Automotive Ethernet umfasst die elektrische Prüfung der physikalischen (PHY) Schicht mehrere Schlüsselattribute der Sender-/Empfängerperformance (Transceiver), wie in Tabelle 3 dargestellt. Das spezifische Ziel besteht darin, die Konformität des physikalischen Medienanschlusses (PMA) in Bezug auf verschiedene elektrische Parameter zu testen.
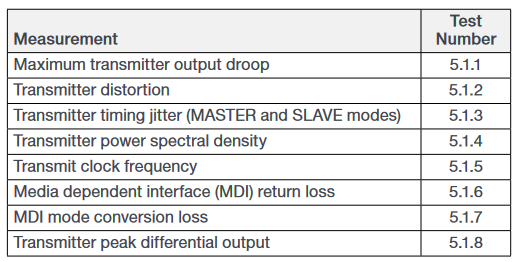
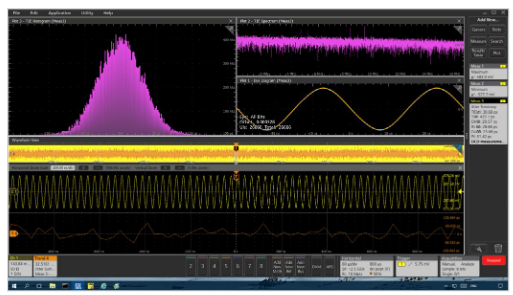
Abbildung 4 zeigt ein Beispiel für einen Timing-Jitter-Test des Hauptsenders. 3 Master- und Slave-Jitter-Messungen können angesichts der engen Konformitätsgrenzen und der Notwendigkeit, alle möglichen Quellen von zufälligem oder deterministischem Jitter zu eliminieren, eine besondere Herausforderung darstellen.
Test-Herausforderung Nr. 3: Validierung der Protokollkonformität und Systemleistung
Die verbreitete Vorstellung eines digitalen Signals ist eine einfache, rechteckförmige Impulsfolge mit zwei Pegeln, die „eins“ oder „null“ darstellen. In Wirklichkeit verwenden die meisten digitalen Kommunikationsnetze mehrere Stufen, um mehr Informationen pro Zeiteinheit zu kodieren. Ein üblicher Ansatz ist die so genannte Puls-Amplituden-Modulation oder PAM.
Automotive Ethernet verwendet eine Technik namens PAM mit drei Ebenen oder PAM3, um höhere Datenraten bei gleicher Taktfrequenz zu erreichen. Bei PAM3 muss jede Stufe mit einem bestimmten Spannungspegel und innerhalb relativ enger Toleranzen funktionieren.
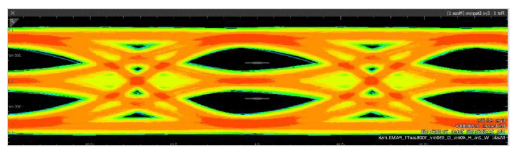
Diese Signale können recht kompliziert sein, aber eine oszilloskopbasierte Messung, ein so genanntes Augendiagramm, ist eine visuell effiziente Methode zur Bestimmung der Signalleistung im Verhältnis zu den Anforderungen an die Signalkodierung (d. h. die Protokollüberprüfung). Die wichtigsten Dimensionen eines Augendiagramms sind die Höhe, Breite, Linearität und Dicke (Abbildung 5). Zusammengenommen liefern diese nützliche Informationen darüber, wie zuverlässig das Signal die kodierten Informationen korrekt übermitteln kann.
Außerdem ist es wichtig zu wissen, dass Automotive Ethernet im Vollduplexbetrieb arbeitet, d. h. die beiden verbundenen Geräte können gleichzeitig Daten senden und empfangen. Dies bietet drei Vorteile im Vergleich zu herkömmlichen gemeinsam genutzten Netzwerken. Zum einen können beide Geräte gleichzeitig senden und empfangen und müssen sich nicht abwechseln. Außerdem verfügt das System über eine größere Gesamtbandbreite. Darüber hinaus ermöglicht Vollduplex gleichzeitige Kommunikationen zwischen verschiedenen Paaren von Geräten (z. B. Master und Slave).
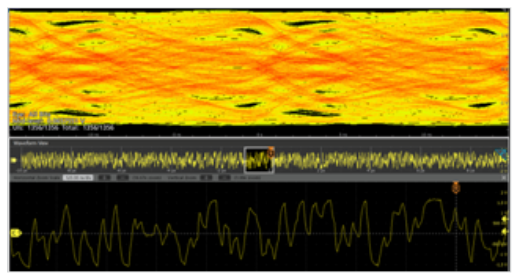
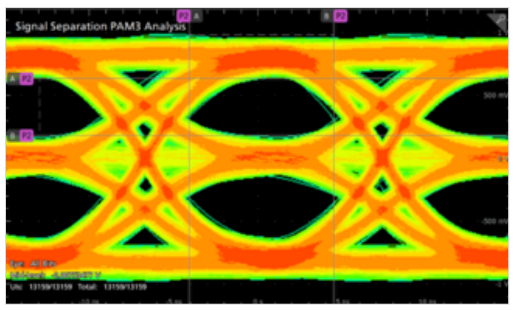
Innerhalb dieser Komplexität stehen Automobilingenieure vor einer weiteren Herausforderung: Vollduplex-Kommunikation mit PAM3-Signalisierung macht es schwierig, den Automotive-Ethernet- Datenverkehr zu visualisieren und anschließend die Signalintegrität vollständig zu charakterisieren. Um eine Signalintegritätsanalyse über die Verbindung durchzuführen und auch das Protokoll in einer realen Systemumgebung (mit einem Oszilloskop) zu dekodieren, müssen die Entwickler jede Verbindung separat betrachten – und das erfordert eine Trennung der Signale, bevor irgendeine Art von Analyse durchgeführt werden kann. Dies wird in den Abbildungen 6 und 7 veranschaulicht, wobei in Abbildung 7 die innovative, nicht-intrusive Signaltrennungslösung von Tektronix verwendet wird.
Eine zuverlässige Kommunikation zwischen den Knotenpunkten ist für den Betrieb des Fahrzeugs entscheidend. Deshalb empfehlen wir dringend, die Signalintegrität und das Protokoll auf Systemebene unter verschiedenen Umgebungsbedingungen, mit unterschiedlichen Kabellängen, Störsignalen usw. zu testen.
Test-Herausforderung Nr. 4: Einblicke für die Fehlersuche und -behebung gewinnen
Unabhängig davon, ob es sich um die Bus-Leistung, EMI, elektrische Konformität oder Protokollkonformität handelt, bestimmen zwei grundlegende Eigenschaften die Signalqualität und damit die Datenleistung: Amplitude und Timing. Ein präziser Betrieb in beiden Dimensionen ist notwendig, um eine erfolgreiche Übertragung digitaler Informationen über den Bus zu gewährleisten. Dies wird bei schnelleren Bus-Raten und immer komplexeren Signalmodulationstechniken (z. B. PAM3) schwieriger.
Als Ausgangspunkt für die Fehlersuche sind sechs Probleme besonders häufig und haben einige bekannte Ursachen:
- Amplitudenprobleme: Schwingen, Droop- oderRunt-Pulse
- Flankenabweichungen: Probleme mit dem Platinenlayout, unsachgemäßer Terminierung, Schaltungsprobleme
- Reflexionen: Probleme mit dem Platinenlayout, unsachgemäße Terminierung
- Übersprechen: Signalkopplung, EMI
- Ground Bounce: übermäßige Stromaufnahme, Widerstand in der Stromversorgung und in den Masse-Rückleitungen
- Jitter: Rauschen, Übersprechen, Instabilität im Timing
Ein Automotive-Oszilloskop ist das bevorzugte Messgerät, aber ohne ausreichende Frequenzabdeckung, Kanalanzahl, Zubehör oder Bildschirm-Analysefunktionen kann sich die Fehlersuche und -behebung mühsam und zeitaufwendig gestalten.
Lösungen: Die Stärken der Standardisierung nutzen
Wie bereits angemerkt, ist die Standardisierung eine seit Langem etablierte, bewährte Praxis in der Automobilindustrie. Wenn wir einen Schritt zurücktreten, um einen größeren Überblick zu gewinnen, kann dieses Konzept auch für die Auswahl von Lösungen für die Prüfung von IVNs angewendet werden. Die Standardisierung durch einen einheitlichen Testansatz hilft Ihnen dabei, die Testkosten zu kontrollieren. Die Wahl einer Testplattform, die sich leicht an höhere Geschwindigkeiten anpassen lässt, ermöglicht zum Beispiel effizientere Ausgaben für Test- und Messlösungen.
In der Praxis müssen wir die organisatorische Trennung der Verantwortlichkeiten während der gesamten Lebensdauer eines Fahrzeugs und seiner Bordsysteme berücksichtigen. Ohne eine einheitliche Strategie würde die gängige Praxis zu einer allmählichen Anhäufung willkürlicher Komponenten vonTesthard und -software in verschiedenen Gruppen führen. Leider reicht ein stückweiser Lösungsansatz nicht aus, um eine gültige End-to-End-Prüfung integrierter Systeme oder Teilsysteme durchzuführen. Die wahrscheinlichen Folgen sind inkonsistente Messergebnisse, entweder innerhalb eines Entwicklungsteams oder über verschiedene Aktivitäten hinweg (z. B. Entwicklung, Validierung, Produktion und Service), sowie längere Testzeiten.
Lassen Sie uns einen genaueren Blick auf die allgemeinen und spezifischen Eigenschaften der Lösungen werfen, die Ihnen helfen, die Testkosten zu senken und gleichzeitig konsistente Ergebnisse über den gesamten Lebenszyklus des Fahrzeugs zu gewährleisten.
Die allgemeinen Eigenschaften von Lösungen im Überblick
Bei allen Arten von IVNs muss die Testlösung es Ihnen ermöglichen, rohe Echtzeitsignale und dekodierten Bus-Datenverkehr zu betrachten. Bei ausgereiften Standards wie CAN, FlexRay, LIN und SENT kann ein Oszilloskop mit Protokolldekodierung verwendet werden, um die Signalqualität und den dekodierten Bus-Datenverkehr anzuzeigen und zu bewerten. Diese Funktionen helfen Ihnen, Konformitätsverstöße zu erkennen, die sich nachteilig auf die Systemleistung auswirken.
Speziell für Automotive Ethernet ist die Fähigkeit, Konformitätstests zu bestehen, eine obligatorische Hürde für Halbleiterhersteller und Tier-1-Lieferanten. Die Durchführung einer detaillierten Signalqualifizierung im Vorfeld der formalen Konformitätsprüfung erhöht die Wahrscheinlichkeit, diese erforderlichen Tests zu bestehen.
Die erforderlichen Messungen am Automotive-Bus können mit einem Oszilloskop durchgeführt werden, das die erforderliche Frequenzbandbreite abdeckt und mit geeigneten Tastköpfen, Halterungen, Signalquellen und Software (z. B. Protokolldekodierung und -analyse) ausgestattet ist. Der CAN-Bus ist zum Beispiel ein Differenzsignal. Obwohl das Oszilloskop den Bus mit Single-Ended-Tastköpfen erfassen und dekodieren kann, verbessert die differentielle Abtastung die Signaltreue und die Störfestigkeit.
Der typische Testprozess besteht darin, den Entwurf einer Vielzahl von Betriebsbedingungen auszusetzen, einschließlich Belastungstests, und seine Leistung zu charakterisieren. Zu den wichtigsten Messungen gehören Spannungs- und Timing-Messungen, die Jitter-Analyse und Augendiagramm-Analyse (z. B. PAM3-Modulationsverfahren). Bei Bedarf sollte es einfach sein, die Ergebnisse in Bezug auf einzelne Konformitätstests zu korrelieren und, was noch wichtiger ist, über die gesamte Lieferkette hinweg zu korrelieren: Halbleiterhersteller, Tier-1-Lieferanten und OEM.
Lösungen von Tektronix entdecken
In direkter Zusammenarbeit mit Ingenieuren der Automobilindustrie, Drittanbietern von Lösungen und Normungsgremien hat Tektronix eine Reihe innovativer Lösungen für die Validierung, Fehlersuche und Konformität von Netzwerken in Fahrzeugen entwickelt. Die Lösungen von Tektronix umfassen branchenführende Oszilloskope, Tastköpfe, Signalquellen, Spektrumanalysatoren und Software. Mit anwendungsoptimierten Softwarelösungen können diese Lösungen so konfiguriert werden, dass sie CAN, CAN-FD, FlexRay, LIN, SENT, Automotive Ethernet und mehr unterstützen. Die Softwareanwendungen von Tektronix bieten fortschrittliche Analysemöglichkeiten und sparen zudem Zeit durch die Automatisierung von Verfahren, Messungen und Berichten.
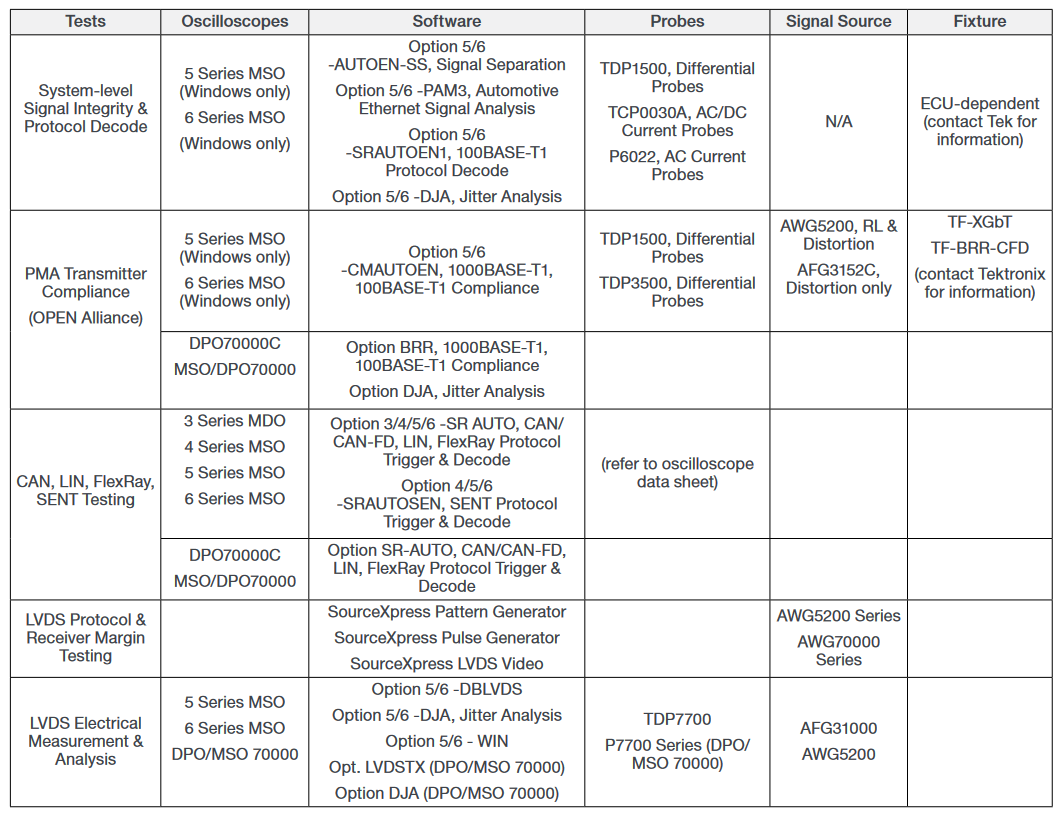
In Tabelle 4 finden Sie einen Überblick über die Lösungen von Tektronix, die sich mit der Prüfung und Analyse in drei Schlüsselbereichen befassen: Signalqualität, PMA-Senderkonformität und spezialisierte Busse. Weitere Informationen finden Sie online unter www.tek.com/automotive und auf den jeweiligen Produktseiten der einzelnen Oszilloskop-Modellreihen (Serie 3, 4, 5, 6 und 70000).
Fazit
Die Gewährleistung eines zuverlässigen Datenflusses mit geringer Latenzzeit zu, von und innerhalb eines modernen Fahrzeugs ist für den sicheren und zuverlässigen Betrieb des gesamten Systems unerlässlich. Das Erreichen dieses Ziels wird angesichts der Anzahl der Busse, die in aktuellen und zukünftigen Fahrzeugkonzepten verwendet werden, immer schwieriger.
Ohne sorgfältige Vorausplanung würde die gängige Praxis zu einer schrittweisen Anhäufung willkürlicher Komponenten von Testhard und -software in verschiedenen Gruppen über den typischen mehrjährigen Entwicklungszeitraum für ein Fahrzeug, System oder Teilsystem führen. Leider reicht ein stückweiser Lösungsansatz nicht aus, um integrierte Systeme oder Teilsysteme durchgängig zu testen. Die voraussichtlichen Ergebnisse sind ineffiziente Ausgaben für Testlösungen und, was ebenso bedenklich ist, inkonsistente Messergebnisse innerhalb eines Entwicklungsteams, zwischen verschiedenen Abteilungen oder entlang der Lieferkette.
Deshalb haben Tektronix und seine Lösungspartner einen einheitlichen Ansatz für das Testen von fahrzeuginternen Netzwerken entwickelt. Über alle wichtigen IVNs und den gesamten Lebenszyklus eines Fahrzeugs hinweg können wir Ihnen und Ihrem Team helfen, neue Entwürfe schneller zur Produktion zu bringen, Validierungstests zu beschleunigen, Konformitätstests zu verbessern, Produktionstests zu optimieren und Service- sowie Prüfungen nach der Reparatur zu vereinfachen. Das Endergebnis ist eine deutlich verbesserte Fähigkeit, Ihre Projektziele hinsichtlich Kosten und Zeitplan zu erreichen.
Wir hoffen, dass Ihnen dieser Leitfaden eine Grundlage für ein tieferes Verständnis vom Testen fahrzeuginterner Netzwerke im Allgemeinen und insbesondere mit Automotive Ethernet geboten hat. Für weitere Informationen wenden Sie sich bitte an Ihren Tektronix Ansprechpartner vor Ort oder besuchen Sie den Automotive-Bereich auf unserer Webseite.